¥8799
¥12699
7天可退款
- 系统学习
- 29周
- 教学服务
- 12个月
- 教学模式
- 学练一体化
- 课程证书
- 通过得证书



课程大纲及学习周期安排
坚持学习的路上,我们为你画好成长路标
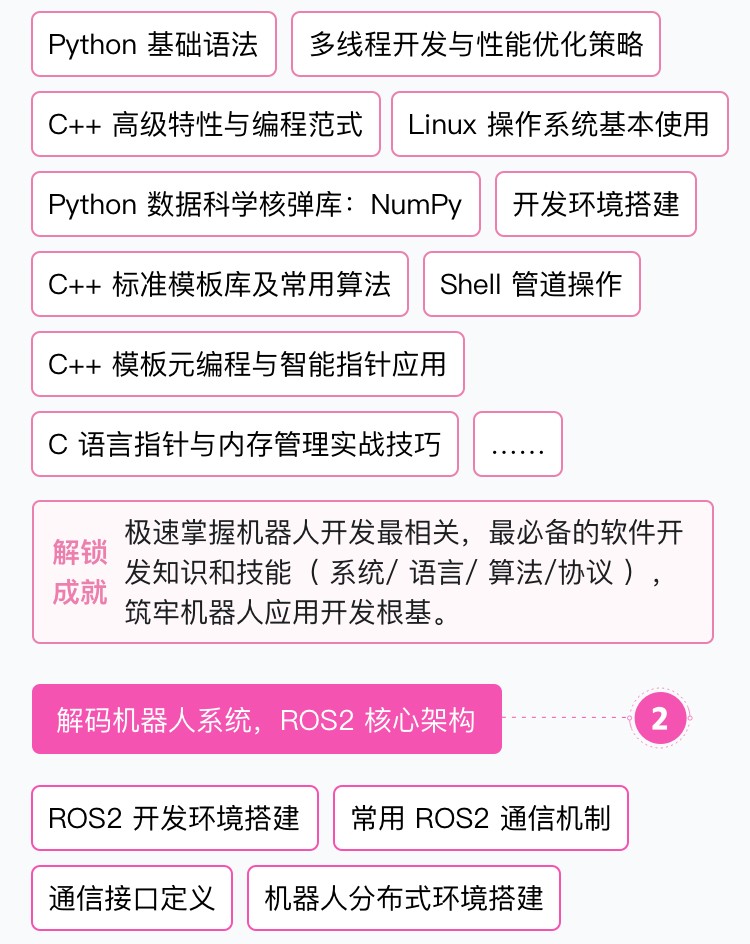
阶段一:ROS2 开发必备基础之 Python 数据处理与计算机视觉
- 第1周
- 第2周
- 第3周
在 ROS2 开发里,Python 是提升效率的核心语言。本周从基础入手,详解分支语句逻辑与嵌套,剖析各类循环及编程实践,解读字符串操作,解析列表、元组数据结构,为后续 ROS2 节点开发、数据处理等实战筑牢语言根基。
- 1、开发环境搭建,讲解输入输出、变量(命名规则、作用域等)、数据类型(整型、浮点型等转换)、运算符(算术、比较等)、语句(分支、循环)等必备基础,并结合练习带你巩固运用。
- 2、详解字符串(索引、切片等)、列表(增删改查、排序等)、元组(特性)、字典(操作、遍历)、集合(操作),提升数据处理能力。
- 3、剖析循环与判断逻辑,助力掌握程序逻辑设计,提升问题解决能力。
- 4、每个知识点配备对应练习,带你学练结合结合,深化理解。
本周聚焦 Python 进阶,讲解函数装饰器、多值参数优化代码;深入“类”并实践,剖析继承与多态提升复用扩展;夯实异常处理、文件操作保稳定;讲解多任务、多进程线程,助你掌握高级编程,应对 ROS2 开发挑战。
- 1、涵盖函数高级应用(参数传递、递归等)、面向对象编程(类与对象、方法定义等),从基础迈向进阶,提升编程深度。
- 2、包含函数案例练习、文件读写操作、异常处理实践等,强化理论与实际结合,提升解决问题能力。
- 3、融合函数、面向对象、异常处理、多任务(线程)等多模块,构建多元化知识结构,适应复杂编程场景。
- 4、面向对象部分深入讲解类的封装、继承等,助力学员掌握抽象设计思维,提升代码组织与复用能力。
- 5、多任务处理、文件操作等内容紧密联系实际开发需求,如多线程提升程序效率,文件操作满足数据存储需求。
本周聚焦数据处理与计算机视觉。搭建数据处理环境;深入 NumPy 数组,提升传感器数据处理效率;学数据统计分析。再完成 OpenCV 配置,掌握图像绘制处理,探究卷积、算子及边缘检测,为视觉开发打基础,提升相关能力。
- 1、深入讲解 numpy 数组创建、索引、运算及函数应用,构建实用的数值计算知识体系,夯实数据处理基础。
- 2、剖析 numpy 底层优化机制,提升大规模数据运算效率,满足高性能计算需求,助力高效解决复杂计算问题。
- 3、涵盖计算机视觉基础操作(图像读取、显示、灰度转换等)与进阶处理(二值化、边缘检测),紧密贴合实际应用场景,掌握实用视觉处理技能。
- 4、通过计算机视觉多环节实践,强化图像分析与处理能力,培养从基础操作到复杂任务的进阶技能,提升综合应用水平。
阶段二:ROS2 开发必备基础之 C 语言核心编程进阶
- 第4周
- 第5周
- 第6周
- 第7周
在 ROS 开发中,C 语言因高效底层特性助力系统优化与原理掌握。本周课程涵盖 C 语言基础概念与编译环境搭建,解析常量、变量、整型数据类型,讲解字符与字符串处理技巧,夯实编程基础,为后续开发等奠定核心能力基础。
- 1、学会printf和scanf函数,实现数据在程序与外界的交互。
- 2、掌握遵循规则命名变量,区分其作用域,合理存储和使用数据。
- 3、掌握整型、浮点型等数据类型间的自动与强制转换规则。
- 4、学习用分支语句(if - else、switch - case )做条件判断,循环语句(for、while )实现重复操作。
在 ROS 开发中,C 语言凭借高效底层操作能力成为系统性能优化核心。本周进阶课程解析运算符与类型转换,强化数据处理能力;讲解分支循环结构,提升逻辑控制水平;剖析数组应用,掌握传感器数据管理技术,为底层开发与优化筑基。
- 1、掌握各类运算符,包含数学运算符、自增自减、比较、逻辑等运算符,以及运算符优先级,帮助理解程序中的运算规则。
- 2、学习流程控制语句,if分支语句、switch语句,用于实现程序的条件判断和分支执行。
- 3、学习循环语句,涉及while、do - while、for循环;实现重复执行代码块的功能,break和continue用于控制循环流程。
- 4、掌握数组知识:包括一维数组和多维数组,掌握数据的集合存储与处理方式。
在 ROS 开发中,C 语言高级特性是底层优化与高效开发核心。本周课程聚焦函数与多文件编程优化工程结构,解析指针在函数、数组中的应用,深入内存管理机制以保障系统稳定性,强化核心能力为底层开发及复杂任务处理筑基。
- 1、学习函数相关内容,剖析函数的作用与分类,总结系统函数调用,讲解函数定义、声明、执行流程及参数等知识。
- 2、学习指针基础,介绍指针和引用,包括变量指针与引用、指针类型及所占空间,以及野指针、万能指针等概念,掌握指针基本原理。
- 3、细化指针操作,讲解通过指针间接修改变量、取数组元素、指针运算,能用数组指针获取元素个数,还能利用指针实现strlen等函数功能,提升指针实操能力。
- 4、深入讲解指针传递与返回,分析值传递和址传递,明确数组名参数传递细节,掌握指针作为函数返回值的用法,深化指针在函数间数据传递的理解。
在 ROS 开发中,C 语言数据结构与文件操作是提升数据管理效率的核心。本周课程解析结构体嵌套与数组应用、联合体特性、文件读写控制与路径处理技术;强化数据组织与文件交互能力,为传感器数据处理、配置文件优化等底层开发筑基。
- 1、学习结构体基础,定义与赋值,涉及结构体嵌套、结构体数组,掌握结构体基本构造与数据组织方式。
- 2、细化结构体操作,学习结构体变量交换,处理结构体成员为指针、结构体为指针的情况,以及堆空间创建结构体,提升结构体操作技能。
- 3、深入解析结构体传参,了解值传递、地址传递对结构体的影响,能用结构体数组做函数参数,掌握const修饰结构体指针,规范结构体数据传递。
- 4、学习文件操作,掌握标准输入、输出和关闭,了解文件分类,区分文件指针与普通指针;学会文件打开和关闭、相对路径与绝对路径;实现文件写入、读取,能用stat获取文件大小,以及文件重命名和删除,构建文件操作知识体系。
阶段三:ROS2 开发必备基础之 C++ 高级编程应用进阶
- 第8周
- 第9周
- 第10周
- 第11周
- 第12周
本周聚焦 C++ 基础入门,解析基础概念,搭建知识框架;探讨 C++ 相较 C 的优势特性,提升代码安全与效率;实践引用、函数默认值等扩展功能,为后续 ROS 开发中复杂系统设计与性能优化筑牢语言根基。
- 1、学习C++基础特性、 C++版本、双重冒号作用;深入理解命名空间使用,包括命名空间嵌套、using声明和指令,掌握命名空间组织代码的方式。
- 2、学习函数增强特性,涵盖全局函数、函数模板、类模板的隐藏与重载,拓展函数运用能力,理解函数在 C++ 中的进阶特性;学习结构体在 C++ 中的增强内容,深化对结构体在 C++ 中不同于 C 语言的理解。
- 3、深入理解运算符重载,涉及基本、三元表达式、赋值、const 等运算符重载,以及 const 成员函数、内存分配函数的特殊重载,掌握运算符在 C++ 中的自定义方式。
- 4、学习C++的引用相关内容,理解引用语法、引用做参数传递、引用底层原理;明确指针引用,掌握引用在 C++ 中的使用及原理。
在 ROS 开发中,C++ 类与对象机制是高效代码封装核心。本周详解访问权限与构造函数、数据封装与初始化;剖析初始化列表与对象模型,解析内存管理;实践运算符及函数重载。助力规范封装节点模块、优化架构,为复杂功能实现筑基。
- 1、讲解构造与析构函数,详细剖析构造函数分类、调用时机及细节,以及析构函数调用规则。深入探讨值传递时拷贝构造函数调用、浅拷贝与深拷贝问题,掌握对象生命周期关键函数。
- 2、讲解类的初始化与关键字,介绍初始化列表写法,讲解类对象作为类成员的情况,了解 explicit 关键字避免隐式转换,掌握 new 和 delete 操作符及使用注意点。
- 3、细化静态成员与单例模式:学习静态成员变量和函数,明确 const 静态成员属性,深入理解单例模式,掌握经典实现模型。
- 4、深入友元与运算符重载,知晓全局函数和类作为友元的用法,重点掌握运算符重载实现函数重载的细节,包括左移、自增等运算符重载,以及智能指针、赋值和算术运算符重载,拓展类的操作功能。
本周 C++ 四大核心展开,解析继承机制,奠基 ROS 代码复用;探究虚函数与抽象类,助力模块交互;详解函数模板,提升 ROS 数据处理通用性;学习类型转换等,增强 ROS 系统稳定性。提升复杂场景编程能力。
- 1、介绍虚函数基础,讲解虚函数基本原理、继承时虚函数的表现,以及虚函数的声明和访问规则,构建虚函数的基础认知体系。
- 2、细化虚函数进阶,深入探讨虚函数表、虚函数与成员变量关系,以及菱形继承中虚函数问题,剖析虚函数在复杂继承结构中的特性;学习多态的概念、分类(静态多态、动态多态),掌握动态多态实现原理,包括父类指针指向子类对象时的多态调用,理解多态在面向对象编程中的核心作用。
- 3、讲解模板基础,介绍模板概念、通用实现,以及模板的重载规则,掌握模板的基本使用方式,开启泛型编程入门。
- 4、介绍异常处理,了解 C++ 异常机制基础,包括异常抛出、捕获和处理流程,掌握自定义异常类及异常处理的常见场景应用,增强程序健壮性。
C++ 的 STL 是 ROS 处理数据关键工具。本周详解 STL 容器基础、string、vector 动态存储与遍历;实践 deque、stack 特性与操作。运用 STL 优化数据结构,为传感器数据处理等提供支持。
- 1、讲解STL基础,阐释STL概念与基础语法,介绍基础容器,掌握遍历容器(包括自定义数据类型遍历)及容器嵌套容器遍历方法,搭建 STL 认知框架。
- 2、介绍string 容器,全面讲解 string 容器赋值、存取字符、拼接、查找、插入删除、替换、比较、类型转换、大小写转换等操作,熟练掌握字符串处理技巧。
- 3、介绍vector 容器,剖析 vector 容器动态容量空间,介绍构造函数、常用赋值操作、大小获取、元素存取、插入删除,以及巧用 swap 收缩内存和 reserve 预留空间,灵活运用 vector 容器。
- 4、介绍其他序列式容器,介绍 deque 容器、stack 栈容器、队列容器和 list 容器,涵盖 list 容器排序、删除自定义类型等操作,了解不同序列式容器特性与应用场景。
在 ROS 开发中, C++ 常用算法与技术是提升效率的关键,本周首探函数对象等算法,实践查找、排序等常用算法,学习时间处理与类型转换,掌握 XML/YAML 配置管理及多线程并发。助你优化 ROS 数据流程,提升性能。
- 1、讲解函数对象与适配器,介绍函数对象(仿函数)概念,包括一元、二元谓词,以及函数对象适配器(取反、函数、成员函数适配器等),理解函数对象在算法中的应用与灵活适配机制。
- 2、介绍常用算法涵盖查找类,如 transform 搬运数据、find 普通查找、find_if 按条件查找、adjacent_find 找相邻重复元素、binary_search 二分查找;统计类的 count 统计元素个数;排序类有 sort 排序、shuffle 随机打乱、reverse 反转、copy 拷贝;集合类包括交集、并集、差集算法 ,可用于处理集合间关系。
- 3、介绍时间相关技术,介绍时间起始点、自定义时间间隔、时间换算、精准时钟,掌握时间相关操作,满足时间处理场景需求。
- 4、讲解 lambda 表达式基础(捕捉列表、参数、函数体等)、thread 线程基础、数据打印到容器及容器数据读取,拓展编程中不同场景的处理能力。
阶段四:ROS2 开发必备基础之 Linux 与 Shell 入门
- 第13周
在 ROS2 开发中,Linux 是核心运行环境,Shell 编程是系统管理关键。本周从 Linux 操作入门,详解系统架构、文件管理等常用命令,深入用户权限与磁盘管理;开展Shell编程实践,提升系统操作与自动化能力。
- 1、讲解Linux 基础操作,掌握 cd/ls 等命令,学会文件增删改查、权限设置(字母 / 数字法)及远程连接(putty/winscp)。
- 2、介绍Shell 编程入门,学习变量传参、运算符使用,掌握函数定义与分支 / 循环语句(if/case/for)。
- 3、讲解系统管理技能,实现进程管理(关闭进程 / 解决端口占用)、系统监控及关机重启操作。
- 4、介绍进阶实用技巧,运用文件查找(grep/find)、重定向 / 管道及压缩解压缩(tar/gzip)提升效率。
阶段五:ROS2 核心架构解析
- 第14周
- 第15周
- 第16周
- 第17周
- 第18周
本周带领大家初识 ROS2 ,从诞生背景、概念作用等,带你把握核心优势;详解安装配置全流程,手把手带你体验开发流程,为开发筑牢基础。
- 1、介绍 ROS2 诞生背景,作用及发展历程,对比 ROS2 与 ROS 体系,横向、纵向剖析优势,为学习 ROS2 建立宏观认知。
- 2、讲述了ROS2 安装方法,分步讲解安装流程(如启用仓库、设置源、安装、配置等),介绍卸载方式,以 colcon 构建工具辅助,还涉及测试,确保安装正确可用。
- 3、带你快速体验与工具配置,了解基本流程、源码编写、 ROS2 运行优化。围绕 VSCode 展开,讲解安装、启动、插件安装、路径配置、程序编写及配置文件修改,同时涉及终端工具安装,助力搭建开发环境。
- 4、讲解系统相关知识,涵盖文件系统概览、编码风格、初始化与资源释放、配置文件、常用命令,深入核心模块通信、工具相关知识;介绍 ROS2 体系框架技术支持及应用方向,构建 ROS2 系统知识体系。
本周课程聚焦 ROS2 通信机制,详解话题(发布 - 订阅 / 异步 / 高频数据交互)、服务(请求 - 响应 / 同步 / 即时反馈)、动作(异步 / 长周期任务 / 进度反馈)三种方式,为复杂系统开发筑牢基础。
- 1、讲解了通信机制核心,介绍 ROS2 通信机制,涵盖节点与话题、通信模型、接口准备等,通过话题通信案例分析消息发布订阅,包括原生及自定义消息的 C++ 和 Python 实现。
- 2、介绍了服务通信,讲解服务通信概念作用,以案例剖析接口定义,分别用 C++ 和 Python 实现服务端与客户端,涵盖流程梳理、建连及请求处理等。
- 3、深入动作通信,阐述动作通信场景概念,以案例展开,用 C++ 和 Python 实现服务端与客户端,涉及创建框架、流程说明、目标处理等。
- 4、解析参数服务,说明参数服务场景概念,介绍参数简介及 C++、Python API,展示 C++ 和 Python 实现的服务端与客户端代码框架及相关操作。
本周涵盖分布式通信架构、时间 API(Rate/Time/Duration)、通信调试工具,通过综合作业融合多通信方式及参数服务,夯实 ROS2 项目开发技术根基。
- 1、介绍通信机制拓展,深入分布式系统,讲解其概念、作用及域 ID 计算规则;介绍工作空间覆盖原理与作用,同时引入时间相关 API(Time、Duration 等),丰富 ROS2 通信机制的理论知识。
- 2、讲解命名问题处理,聚焦节点和话题重名难题,详细阐述 rosrun、launch 等解决方法,涵盖 launch 工具简介、具体实现步骤及话题类型设置等操作,确保命名的唯一性与规范性。
- 3、讲解通信工具使用,全面介绍通信机制工具,涵盖各类命令行工具(如 ros2node、ros2topic 等)的功能与使用方式,帮助熟练运用工具进行节点、话题、服务等通信相关的操作与调试。
- 4、通过期中实践巩固,对话题、服务、动作通信及参数服务开展案例分析与实践。细致梳理实现流程,包括接口定义、服务端与客户端实现等环节,强化对 ROS2 通信机制的理解
本周 聚焦实用工具:详解 launch 文件与 rosbag2 数据处理,学习 rviz2 界面操作及显示优化,通过 C++/Python 实现坐标变换。实操提升工具链使用能力,为开发调试提效。
- 1、介绍了launch文件,包括launch文件与 rosbag2,阐述 launch 文件应用场景、准备工作及基本使用,涵盖 C++ 和 Python 实现,包括参数设置、节点操作等,还涉及 xml、yaml 文件相关操作。
- 2、讲解如何使用rosbag2 工具,讲解 rosbag2 功能作用、命令使用,以及 C++ 和 Python 实现的录制与播放,如源码搭建、数据处理等内容。
- 坐标变换基础:说明坐标变换概念、流程,介绍相关消息,通过简单例程展示使用方法,为后续深入学习打基础。
- 3、解析静态坐标广播,以案例分析入手,分别用 C++ 和 Python 实现静态坐标广播,包括源码搭建、流程说明及补充要点,实现静态坐标信息发布。
- 4、实现动态坐标广播与监听,进行动态坐标广播案例分析,用 C++ 和 Python 实现广播与监听,包含源码搭建、流程实现,以及监听中滤波器创建等操作,完成动态坐标信息处理。
本周通过乌龟跟随 / 护航案例,用 C++/Python 实现逻辑控制与节点通信;学习 rviz2 可视化操作及 URDF/xacro 语法,优化代码复用性。强化编程与可视化能力,积累复杂项目实践经验。
- 1、以乌龟跟随、护航为例,通过 C++ 和 Python 实现,涵盖乌龟生成、坐标变换广播监听等操作,还有 launch 文件配置,强化 ROS2 实际应用能力。
- 2、讲解使用可视化工具:介绍 rviz2,包括安装、界面布局及基本使用,讲解集成 urdf 实现流程,涉及案例搭建、文件生成等,利用工具直观呈现机器人信息。
- 3.、解析URDF语法学习,系统讲解 URDF 语法,如 robot、link、joint 等元素定义与使用,通过练习掌握车体、车轮等建模,描述机器人结构。
- 4、讲解模型优化工具,阐述 xacro 工具概念作用,快速体验其优势,学习语法(宏、文件包含等),通过练习搭建机器人模型,优化 URDF 模型,提升建模效率。
阶段六:Mycar 智能车 ROS2 开发实战
- 第19周
- 第20周
本周 “MyCar 开发基础实战” 课程围绕自研 MyCar ROS2 小车展开。课程涵盖通识、开发环境与硬件实践、通信实践,助学员理解架构、掌握基础技能,为后续功能开发打基础。
- 1、介绍了MyCar 基础与开发,介绍硬件功能及使用准备,讲解远程开发流程,含 IP 获取、环境配置及机器人启动。
- 2、讲解了Mycar建图导航与硬件,涉及建图工具应用、机器人导航,介绍底层驱动、里程计显示及传感器安装与功能实现。
- 3、深入通信、话题、服务动作通信在Mycar的实践,说明话题、服务通信需求,展示 C++ 和 Python 实现的发布订阅、服务端客户端功能。
- 4、细化仿真与实践,介绍模拟器使用,阐述 MyCar 实践内容,验证和优化功能。
本周 “ROS2 开发理论与实践进阶” 课程聚焦深化开发能力。内容含系统管理与工具应用、launch 与数据管理、坐标变换与多机协同、模型应用实践,助学员提升系统管控等能力,为进阶项目开发筑基。
- 1、介绍了通信与工具,讲解本地及分组通信,介绍话题、节点名设置,以及 rqt graph、rqt console 工具使用。
- 2、讲解机器人启动方法,介绍 launch 文件,涵盖机器人启动的文件准备、测试与集成。
- 3、深入Mycar坐标变换的实现,围绕设备介绍坐标变换及发布,利用 launch 集成并处理相关操作。
- 4、解析多机器人与模型,涉及多机器人坐标变换、实体与仿真集成,介绍相关工具及模型显示实现。
阶段七:ARM 平台 ROS2 开发进阶
- 第21周
本周围绕树莓派展开多维度实践,内容涵盖环境搭建、Lifecycle 状态机开发、Colcon 工具应用、进程内通信优化、参数监听及组件与插件开发等,通过多环节实操夯实 ROS2 项目开发实践基础。
- 1、安装与工具:讲解 Win10 及树莓派安装 ROS2,介绍 colcon 构建工具用法。
- 2、lifecycle 框架:介绍 lifecycle 功能包,涵盖 C++ 和 Python 框架搭建与执行。
- 3、进程内通信:讲解 C++ 和 Python 实现高效进程内通信,包括节点、话题相关操作。
- 4、功能拓展:涉及话题统计、内容过滤,参数事件,组件及插件实现,丰富 ROS2 应用。
阶段八:ROS2 在机器人关键应用领域应用实训
- 第22周
- 第23周
- 第24周
- 第25周
- 第26周
- 第27周
本周聚焦关键内容:介绍 ROS2 功能点与机器人架构,搭建远程开发环境,解决 USB 设备识别问题,讲解硬件平台使用及 rviz2 显示里程计状态,用 C++ 和 Python 实现功能,助学员掌握核心技能。
- 1、、为实训进行前期准备,介绍机器人组成,讲解远程开发 SSH 环境搭建及与 VScode 优化配置,还有 USB 端口设置,为后续开发奠定基础。
- 2、解析底盘与里程计的实现,说明底盘基本使用,讲解里程计消息接口,通过 C++ 和 Python 案例分析里程计数据,掌握里程计原理与应用。
- 3、教学激光雷达的使用,介绍单线、多线激光雷达基本使用及消息接口,通过 C++ 和 Python 案例分析数据收发与处理,实现对激光雷达功能的运用。
本周课程聚焦热门传感器实操,涵盖激光雷达、相机、IMU、GNSS 等,内容包括概念学习、仿真开发、消息接口实现、数据处理及多传感器融合等,助学员掌握 ROS2 中传感器核心应用与开发技巧。
- 1、讲解视觉传感器仿真,包括单目、深度相机使用及消息接口,通过 C++ 和 Python 案例掌握相机数据处理。
- 2、入惯性与定位传感器数据处理,介绍 IMU、GNSS 使用及消息接口,借案例解析惯性测量与定位原理。
- 3、实现传感器融合,涵盖轮式里程计校准与 IMU 融合、雷达滤波器应用、点云与激光数据互转,提升综合处理能力。
- 4、讲解 ROS2 远程图传、相机参数标定等功能,拓展其在机器人传感与通信领域的应用。
本周 聚焦机器人核心技术,第一节讲仿真场景、概念及工具(stage_ros2/ignition_gazebo)使用与集成;第二节解析导航与 SLAM 概念、架构及技术内涵,为自主导航开发筑牢基础。
- 1、概述仿真基础,简述 ROS2 仿真,明晰其概念与意义。
- 2、带你使用stage ros2,讲解安装运行,掌握框架搭建、元素添加等操作。
- 3、带你使用Ignition Gazebo,介绍安装集成,学会环境创建、设备添加及控制。
- 4、带你使用ROS2导航,说明导航架构与条件,掌握建图工具安装及节点使用。
本周聚焦自动驾驶,涵盖地图构建、AMCL 定位、导航配置、多车编队等实用技能,助学员提升 ROS2 开发与协同能力 。
- 1、讲解坐标系、格式转换、数据操作等配置,夯实机器人环境感知基础。
- 2、围绕电机、舵机调试,涵盖 PID 参数、控制指令,掌握硬件控制核心要点,保障机器人运动精准。
- 3、深入 ROS2 参数设置,涉及节点参数、消息话题,搭配算法(导航、坐标转换),构建系统功能框架。
- 4、结合实际场景,通过多模块融合(地图、硬件、算法 ),实现机器人系统搭建与功能调优,提升实战能力。
本周围绕OpenCV图像处理(图像读取、格式转换、边缘检测等)、单目视觉算法(深度估计、目标检测)、编程部署(模型转换、推理)展开,并且结合讯飞 SDK 集成语音交互,助力学员掌握机器人视觉与智能语音开发核心技能。
- 1、机器视觉基础:讲概念、OpenCV 与 ROS2 衔接(cv_bridge),析图像转换逻辑。
- 2、图像转换实践:以 C++/Python,实现 OpenCV 与 ROS2 图像互转的代码落地。
- 3、车道线识别:多语言开展车道线检测,从框架搭建到阈值、分割等算法实践。
- 4、智能语音集成:基于讯飞 SDK,完成安装、测试,集成 ROS2 实现语音识别与合成。
本周 围绕自动驾驶开发,涵盖感知(环境、图像 / 点云处理)、决策(行为决策、ROS2 通信)、控制(轨迹规划等),从算法到实操,提升无人系统开发能力。
- 1、运动控制:涉及基础运动组件设计,用 C++/Python 实现速度、轨迹控制,适配多场景运动策略。
- 2、环境感知:聚焦传感数据采集、滤波,完成地图构建、障碍物识别,适配多环境分析。
- 3、行为决策:基于感知设计行为逻辑,借代码实现避障、路径规划等智能决策。
- 4、资源工具:提供多语言开发模板、SDK,覆盖配置到进阶,助力高效开发落地。
阶段九:机器人底盘与雷达技术深度开发实践
- 第28周
- 第29周
本周聚焦核心技能,进行 Boost.Asio 串口实操,夯实通信基础,再开发底盘驱动,搭建代码框架并实现控制与解析功能;最后探索 ROS2 驱动集成,实现通信、数据发布及里程计功能。课程助学员掌握关键技术,奠定开发基础。
- 1、课程课程介绍底盘开发,讲解 boost asio 用法,实现工具类串口操作及优化。
- 2、讲解电机控制:介绍电机速度控制、启停及 PID、舵机控制实现。
- 3、深入数据处理,剖析数据读取,涉及消息类型、结构等多方面处理。
- 4、讲解ROS2与运动传感:介绍IMU串口实现、里程计实现数据发布处理。
本周聚焦 TOF 激光雷达实战,讲解组成、原理及优势,实操上位机参数与驱动;剖析通讯协议,演示 SDK 与 ROS2 集成;开发驱动功能包,搭建端口映射与安全机制。课程助学员掌握开发全流程,实现能力升华。
- 1、课程介绍了TOF激光雷达的使用,介绍TOF激光雷达产品,包括原理、优势、安装及物理/性能参数,给出建参建议。
- 2、深入TOF激光雷达通信协议:讲解通讯协议,涵盖数据发送接收格式、测量数据结构及分析,为数据交互奠基。
- 3.、讲解ROS2应用-SDK,介绍雷达 SDK 功能、文件组成、常用 API 等,实现与 ROS2 集成,为开发提供工具。
- 4、深入ROS2应用-驱动,讲解驱动实现,含创建接口、解析数据、launch 文件配置,还介绍安全机制,确保雷达在 ROS2 中稳定运行。

评价 好评
-

岸上观花_klnzD6 12-02 09:49:22
 好评
好评
很好,通俗易懂,很适合小白
-

慕粉1639298507 12-02 09:39:01
好评
有硬件实操,配置很丰富,淘宝查了一下,同等配置的有些都标价七八千
-

柳絮飞花 09-22 18:51:11
好评
课程讲的非常细致,零基础学习也跟的上。




预售规则
1. 定金支付成功后,可在“我的订单”-“未支付”栏查看所要支付尾款的订单。
2. 尾款支付开启后,请在规定时间内支付尾款,若超出尾款支付时间,订单将自动关闭。请关注短信、慕课网平台及慕课网微信号等渠道推送的提醒消息。
3. 定金可在课程原价基础上抵扣页面显示金额,具体数额及计算方式见详情页。
4. 已支付定金但未在规定时间支付尾款的用户,定金不可退。
5. 如您对预售活动有其它疑问,请联系客服:kf@imooc.com。